With the fretboard on it was time to final fit the neck. This required gluing in a couple of shims into the neck mortice. The shim veneer is supplied.


With the fretboard on it was time to final fit the neck. This required gluing in a couple of shims into the neck mortice. The shim veneer is supplied.
Something a bit different – an engineer’s view of conciousness.
Every so often I see articles on the Internet explaining conciousness in terms of vibrations or quantum theory. However, I think these are over complicating the issue. We can approach the problem from an engineering viewpoint and I think the reason for conciousness emerges.
This isn’t an idea I’m claiming for my own – I came across it when researching robotics in the 1990s. However, I haven’t seen it explained anywhere recently so it is probably worth writing down. If you can spot holes in the idea then please comment below.
TLDR: conciousness is a necessary part of creatures that learn how to interact with the world.
Imagine a simple mobile robot. It has:
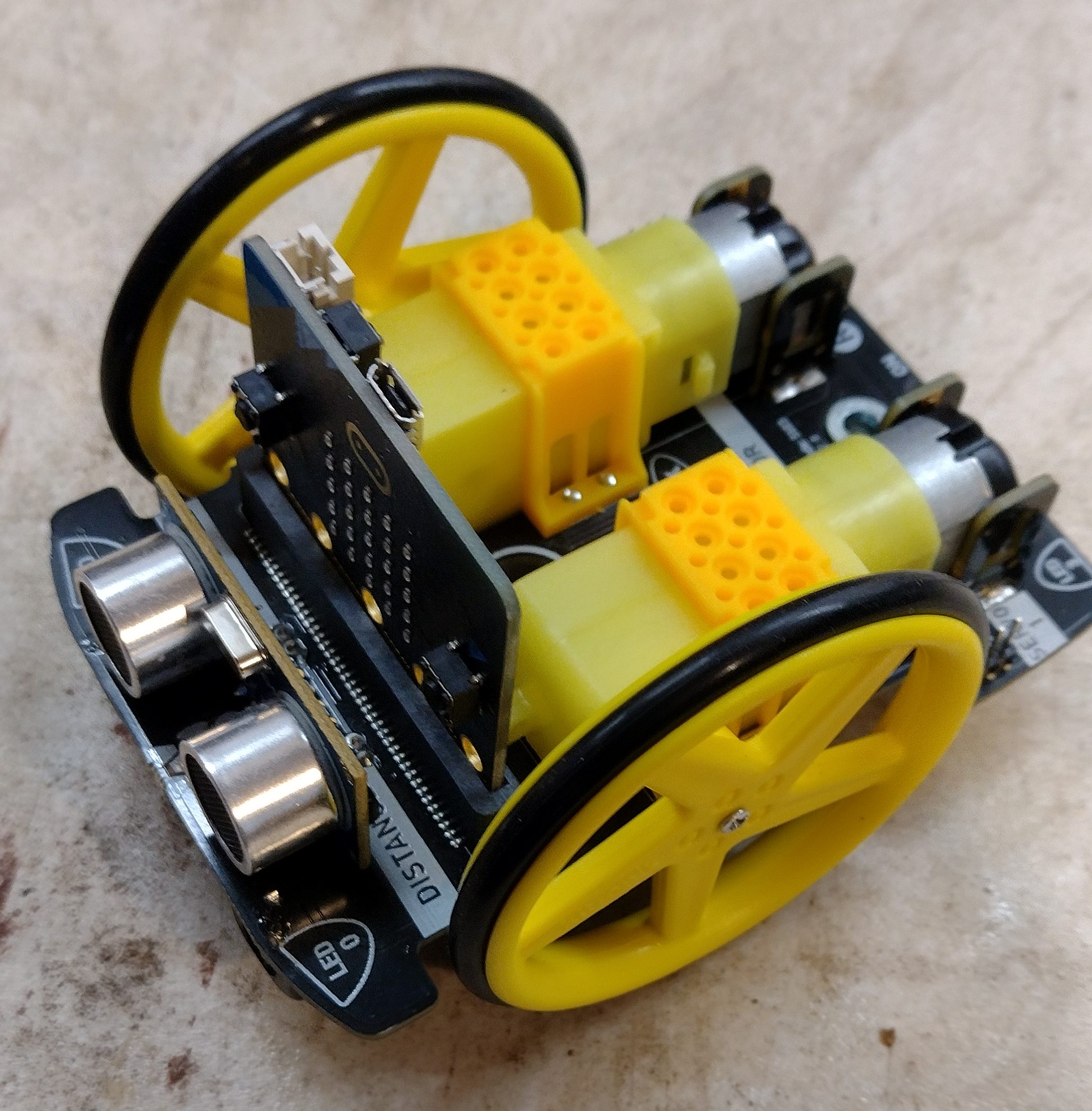
We put this robot into a maze and see what happens.
If we’ve got it right (and there are no dead ends – discussed later) then the robot learns to turn left when the right touch sensor hits something, and turn right when the left sensors hits something.